
10.000 burbujas programables — músculos artificiales controlados con ultrasonido#
Más de 10.000 microburbujas con dimensiones precisas, cada una sintonizada a una frecuencia de ultrasonido diferente. Juntas forman un músculo artificial que se deforma de forma programable — sin cables, sin campos magnéticos, a través de hueso y tejido biológico. Este notebook analiza 3 tablas de benchmark del paper, comparando el enfoque acústico contra 73 actuadores publicados en agarre, fuerza y natación.
El hallazgo: El stingraybot acústico de 50 mm es 714 veces más grande que la mediana de nadadores acústicos previos (0,07 mm) — un salto de casi 3 órdenes de magnitud en escala.
Gráfica clave#
Reproducir#
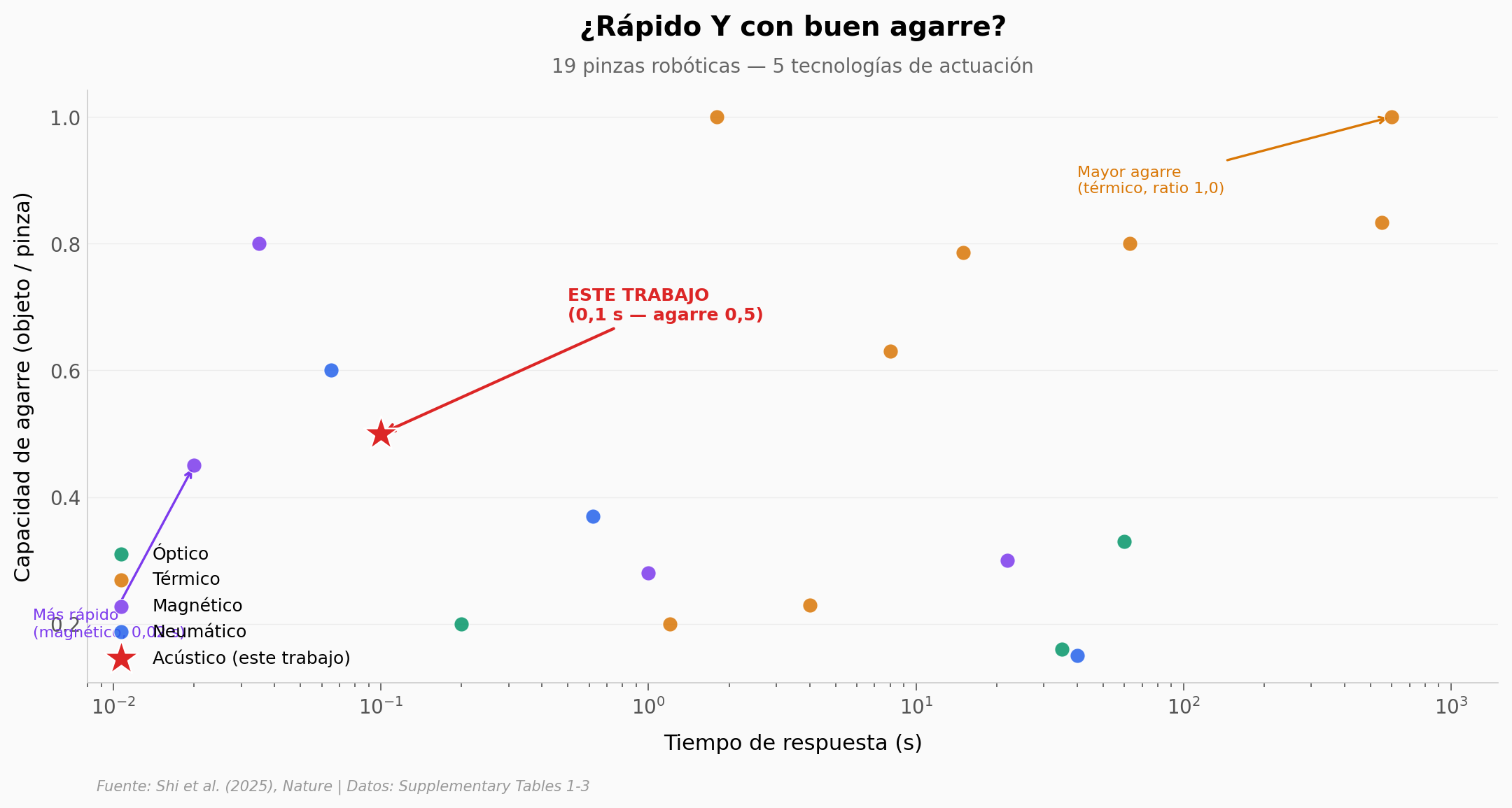
![]()
O localmente:
pip install pandas matplotlib numpy
jupyter execute notebook.ipynb
Datos#
datos/tabla1_grippers.csv— 19 pinzas robóticas, 5 categorías de actuación (tiempo de respuesta vs capacidad de agarre)datos/tabla2_force_weight.csv— 15 actuadores, 7 categorías (ratio fuerza/peso vs tamaño)datos/tabla3_swimmers.csv— 40 nadadores robóticos, 7 categorías (longitud vs velocidad relativa)
Links#
Video: Ver en YouTube
Datos originales: Supplementary Tables 1-3 (SI PDF)