
Un drone vuelve a casa con una red de 3,4 kB#
3,84%. Eso es todo lo que un drone Bee-Nav necesita explorar para aprender a regresar a casa desde 600 m de distancia. La red neuronal que lo guía pesa 3,4 kB — menos que este texto.
Una abeja melífera vuela el 3,4% de su zona para aprenderla. La pregunta que se hizo el equipo de TU Delft fue: ¿podemos copiar ese truco?
Paper: Ou et al. (2026) · Nature · DOI: 10.1038/s41586-026-10461-3 Datos: 4TU.ResearchData (TU Delft)
![]()
Video corto: [Pendiente]
Lo que está en juego#
Para navegar autónomamente, un drone normal carga GPS, mapas y algoritmos de localización y mapeo simultáneos (SLAM, por sus siglas en inglés) que consumen cómputo y memoria. El estado del arte para drones pequeñísimos: 500 kB de memoria solo para cubrir un área de 4×5 m (20 m²).
Las abejas no llevan GPS. Cuando salen por primera vez de la colmena, hacen un learning flight: vuelos cortos en espiral alrededor de la casa, mirando hacia atrás para grabar referencias visuales. Después pueden volver desde kilómetros — sin mapa.
Bee-Nav copia esa idea. El drone hace su propio learning flight sobre una Learning Area (LHA), entrena una red neuronal compacta con esas vistas, y luego puede volver desde mucho más lejos. La pregunta empírica: ¿qué tan pequeña puede ser esa LHA?
# ══════════════════════════════════════════════════════════════
# Configuración — modifica estos valores para explorar
# ══════════════════════════════════════════════════════════════
LHA_DRONE_BEE_NAV = 3.84 # % del área que el drone Bee-Nav debe explorar
LHA_HONEYBEE = 3.4 # % estimado para abejas melíferas
LHA_DESERT_ANT = 7.6 # % estimado para hormigas del desierto
RED_COMPACT_KB = 3.4 # kB red neural Bee-Nav (5 capas)
RED_ATTENTION_KB = 42.3 # kB red neural Bee-Nav con atención (8 capas)
SOTA_TINY_KB = 500 # kB SOTA tiny drone para 4x5m
FUENTE = 'Fuente: Ou et al. (2026), Nature | Datos: 4TU.ResearchData (TU Delft)'
COLOR_DATOS = '#2563EB' # azul CaM — Bee-Nav
COLOR_ALERTA = '#DC2626' # rojo — referencia/anomalía
COLOR_REFERENCIA= '#D97706' # ámbar — biológico
COLOR_BIO = '#059669' # verde — biología
COLOR_OTROS = '#7C3AED' # violeta — métodos alternativos
# ══════════════════════════════════════════════════════════════
# Setup
# ══════════════════════════════════════════════════════════════
import os, urllib.request
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.patches import Rectangle
BASE = 'https://raw.githubusercontent.com/Ciencia-a-Mordiscos/lab/main'
# Cargar estilo CaM (local → GitHub raw fallback)
style_file = '../../cam.mplstyle'
if not os.path.exists(style_file):
style_file = '/tmp/cam.mplstyle'
if not os.path.exists(style_file):
urllib.request.urlretrieve(f'{BASE}/cam.mplstyle', style_file)
plt.style.use(style_file)
# ══════════════════════════════════════════════════════════════
# Carga de datos
# ══════════════════════════════════════════════════════════════
lha = pd.read_csv('datos/lha_por_metodo.csv')
redes = pd.read_csv('datos/redes_neuronales.csv')
homing = pd.read_csv('datos/homing_por_ambiente.csv')
sim = pd.read_csv('datos/visual_homing_simulacion.csv')
print(f'LHA por método: {len(lha)} filas')
print(f'Redes neuronales: {len(redes)} filas')
print(f'Homing por ambiente: {len(homing)} filas')
print(f'Simulación homing: {len(sim)} filas')
print()
print('Métodos LHA y su % del área:')
for _, r in lha.sort_values('lha_pct').iterrows():
print(f' {r["metodo"]:30s} LHA = {r["lha_pct"]:.2f}%')
LHA por método: 5 filas
Redes neuronales: 3 filas
Homing por ambiente: 6 filas
Simulación homing: 7 filas
Métodos LHA y su % del área:
bio_inspired_magnetometer LHA = 0.24%
svo_gtsam LHA = 0.74%
honeybee_estimate LHA = 3.40%
real_drone_bee_nav LHA = 3.84%
desert_ant_estimate LHA = 7.60%
Aquí está.#
# Hero: LHA% por método — drone real, alternativas, referencia biológica
# Ordenamos ascendente para que la lectura visual sea de "menos área" a "más área"
df = lha.copy()
df['categoria'] = df['metodo'].map({
'real_drone_bee_nav': 'Bee-Nav (este paper)',
'svo_gtsam': 'Visual odometry SOTA',
'bio_inspired_magnetometer':'Bio-inspirado + brújula',
'honeybee_estimate': 'Abeja melífera',
'desert_ant_estimate': 'Hormiga del desierto',
})
df['color'] = df['metodo'].map({
'real_drone_bee_nav': COLOR_DATOS,
'svo_gtsam': COLOR_OTROS,
'bio_inspired_magnetometer':COLOR_OTROS,
'honeybee_estimate': COLOR_BIO,
'desert_ant_estimate': COLOR_BIO,
})
df = df.sort_values('lha_pct').reset_index(drop=True)
fig, ax = plt.subplots(figsize=(13, 5.5))
y_pos = np.arange(len(df))
bars = ax.barh(y_pos, df['lha_pct'], color=df['color'], alpha=0.85,
edgecolor='white', linewidth=0.8)
ax.set_yticks(y_pos)
ax.set_yticklabels(df['categoria'], fontsize=10)
# Etiquetas en las barras
for i, (val, lbl) in enumerate(zip(df['lha_pct'], df['categoria'])):
ax.text(val + 0.15, i, f'{val:.2f}%', va='center',
fontsize=10, fontweight='bold', color=df.loc[i,'color'])
# Banda biológica de referencia (3.4 - 7.6%)
ax.axvspan(LHA_HONEYBEE, LHA_DESERT_ANT, alpha=0.08, color=COLOR_BIO, zorder=0)
ax.text(LHA_DESERT_ANT - 0.1, -0.7,
'banda biológica (abeja → hormiga del desierto)',
fontsize=9, ha='right', color=COLOR_BIO, style='italic')
ax.set_xlabel('% del área total que el método necesita explorar para volver a casa',
fontsize=11)
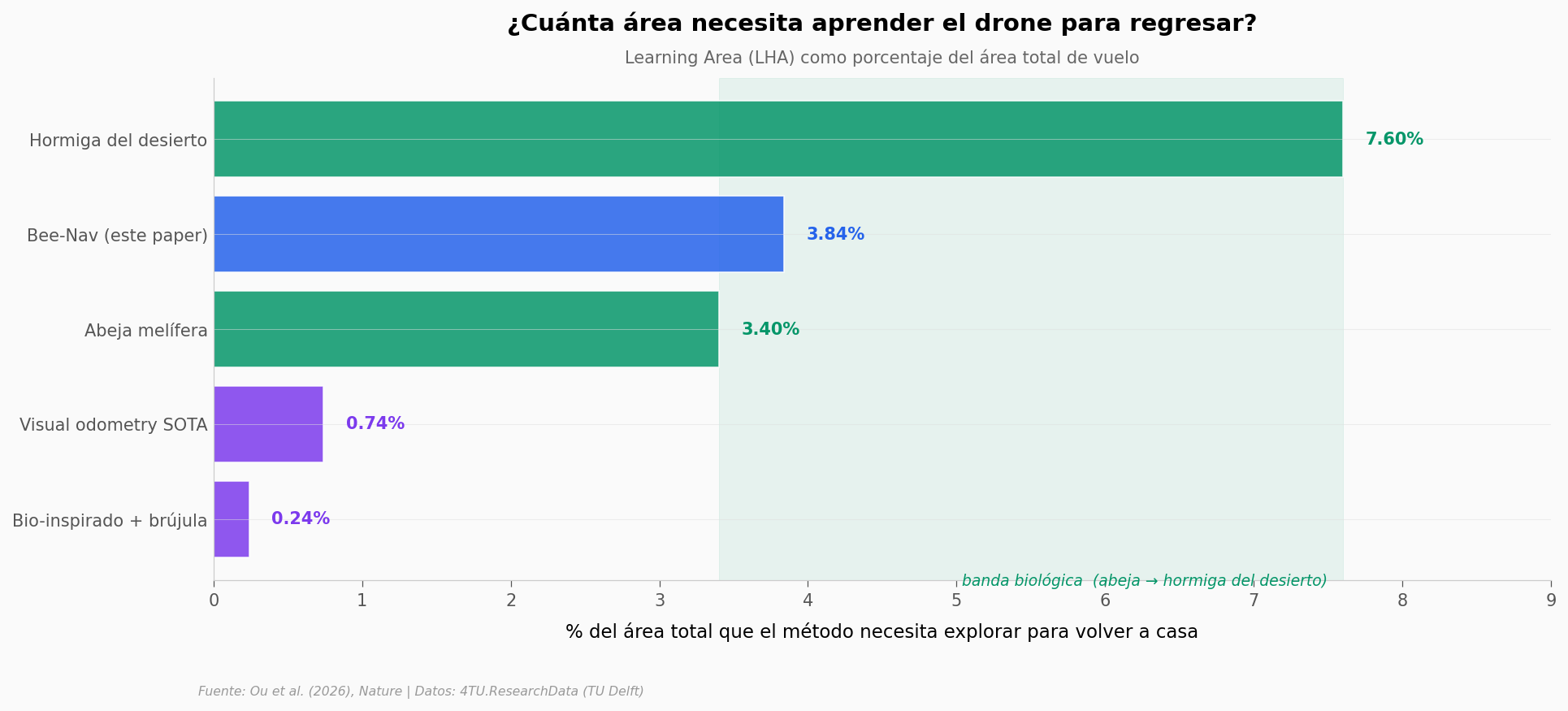
ax.set_title('¿Cuánta área necesita aprender el drone para regresar?',
fontsize=14, fontweight='bold', pad=28)
ax.text(0.5, 1.03, 'Learning Area (LHA) como porcentaje del área total de vuelo',
transform=ax.transAxes, fontsize=10, color='#666666', ha='center')
ax.set_xlim(0, 9)
fig.text(0.13, -0.05, FUENTE, fontsize=7.5, color='#999999', style='italic')
plt.tight_layout()
plt.savefig('figuras/01_lha_por_metodo.png', dpi=200, bbox_inches='tight')
plt.show()
Lo que dice la barra#
El drone Bee-Nav real (azul) cae justo encima de la abeja melífera. Con 3,84% del área aprendida vuelve a casa; la abeja, con un 3,4% estimado, también.
Pero comparar drone y abeja como si fueran lo mismo sería engañoso. Las dos cifras vienen de mecanismos distintos: el drone usa odometría visual sobre sus motores y giroscopios; la abeja integra señales celestes, ópticas y olfativas. Lo que coincide es la estrategia — explorar una zona pequeña al principio para construir un mapa interno — no la implementación.
Los dos métodos alternativos (violeta) son interesantes por la dirección opuesta. SVO+GTSAM es odometría visual de estado del arte: como tiene menos error acumulado, le basta el 0,74% del área. Bio-inspirado + brújula lleva incluso heading absoluto vía magnetómetro, así que solo necesita el 0,24%. El drone Bee-Nav, sin brújula y con sensores baratos, pierde precisión pero gana simplicidad — y sigue dentro de la banda biológica.
¿Cuánto pesa el cerebro del drone?#
La otra parte del truco está en el tamaño de la red neuronal que aprende durante el learning flight. Aquí Bee-Nav se desmarca.
# Gráfica 2: tamaño de red neural (log scale para comprimir 3 órdenes de magnitud)
df = redes.copy().sort_values('tamano_kb').reset_index(drop=True)
df['categoria'] = df['red'].map({
'compact': 'Bee-Nav compact\n(5 capas, vuelos cortos)',
'attention': 'Bee-Nav attention\n(8 capas, vuelos largos)',
'tiny_robot_referencia':'SOTA tiny drone\n(referencia, solo 4×5 m)',
})
df['color'] = df['red'].map({
'compact': COLOR_DATOS,
'attention': COLOR_DATOS,
'tiny_robot_referencia':COLOR_ALERTA,
})
fig, ax = plt.subplots(figsize=(13, 5.5))
y_pos = np.arange(len(df))
bars = ax.barh(y_pos, df['tamano_kb'], color=df['color'], alpha=0.85,
edgecolor='white', linewidth=0.8)
ax.set_yticks(y_pos)
ax.set_yticklabels(df['categoria'], fontsize=10)
ax.set_xscale('log')
# Etiquetas con valor a la derecha de cada barra
for i, val in enumerate(df['tamano_kb']):
ax.text(val * 1.25, i, f'{val:.1f} kB', va='center',
fontsize=11, fontweight='bold', color=df.loc[i,'color'])
ax.set_xlabel('Tamaño de la red neural (kB, escala logarítmica)', fontsize=11)
ax.set_title('Una red de 3,4 kB navega vuelos cortos',
fontsize=14, fontweight='bold', pad=28)
ax.text(0.5, 1.03,
'Bee-Nav compact ≈ un párrafo de texto. SOTA tiny drone ≈ una imagen pequeña.',
transform=ax.transAxes, fontsize=10, color='#666666', ha='center')
ax.set_xlim(1, 2000)
fig.text(0.13, -0.05, FUENTE, fontsize=7.5, color='#999999', style='italic')
plt.tight_layout()
plt.savefig('figuras/02_tamano_red.png', dpi=200, bbox_inches='tight')
plt.show()
# Ratios para acompañar
ratio_atn_compact = RED_ATTENTION_KB / RED_COMPACT_KB
ratio_sota_atn = SOTA_TINY_KB / RED_ATTENTION_KB
print(f'attention / compact = {ratio_atn_compact:.1f}x')
print(f'SOTA tiny / attention = {ratio_sota_atn:.1f}x')
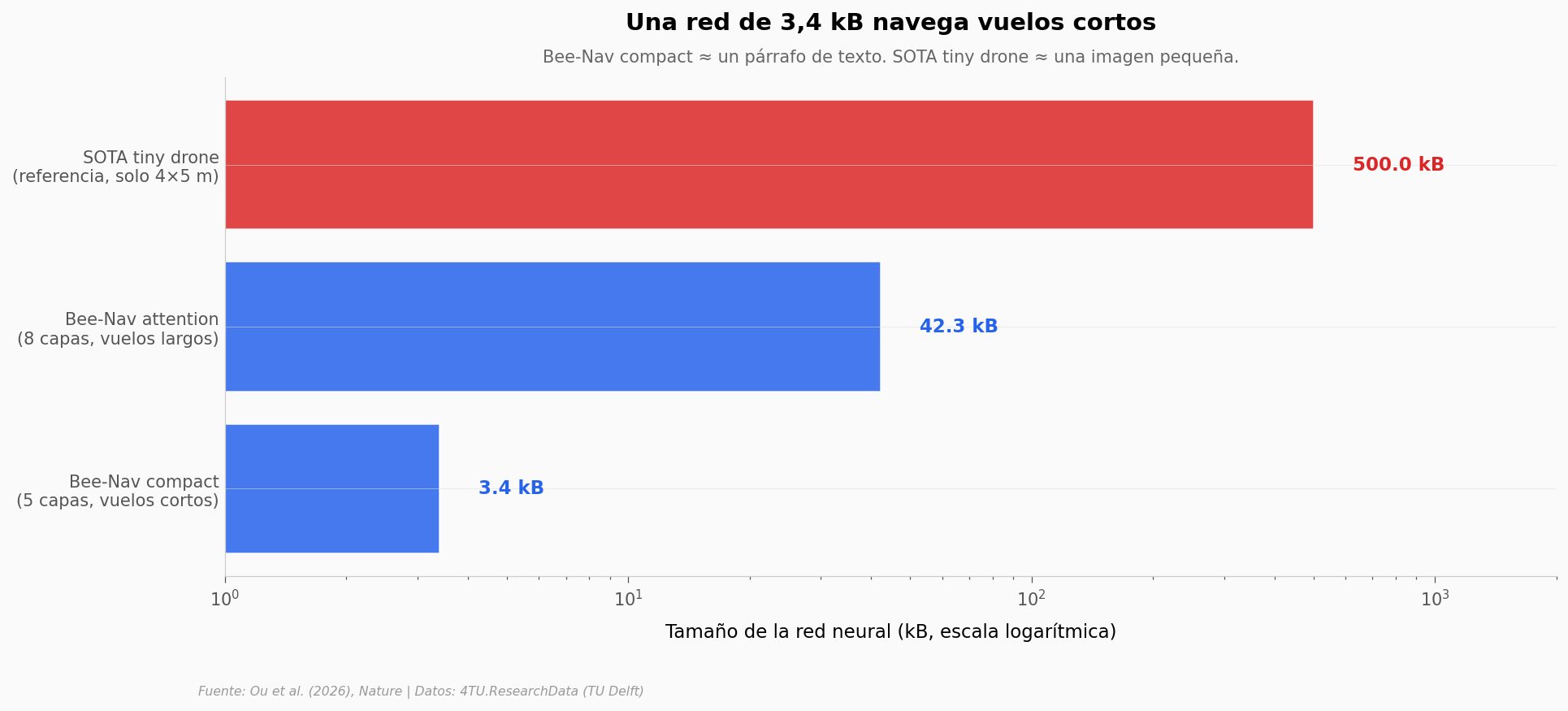
attention / compact = 12.4x
SOTA tiny / attention = 11.8x
¿Y en el mundo real?#
Las redes diminutas suenan bien en simulación. La prueba dura es volar afuera, con viento, sin GPS, y aterrizar cerca de casa.
# Gráfica 3: tasa de éxito por ambiente, de fácil a difícil
df = homing.copy()
df['etiqueta'] = [
'CyberZoo TU Delft\n(indoor 10×10 m, 48 vuelos)',
'Indoor hall UVV\n(30×40 m)',
'Outdoor corto\n(30–110 m)',
'Outdoor largo, viento bajo\n(200–330 m)',
'Outdoor largo, viento alto\n(200–330 m, ráfagas 10 m/s)',
'Outdoor 200–600 m\n(condiciones variables)',
]
# Ordenar por tasa de éxito descendente para lectura clara
df = df.sort_values('tasa_exito_pct', ascending=False).reset_index(drop=True)
def color_por_tasa(t):
if t >= 95: return COLOR_DATOS # azul — éxito alto
if t >= 70: return COLOR_REFERENCIA # ámbar — éxito medio
return COLOR_ALERTA # rojo — éxito bajo
colors = [color_por_tasa(t) for t in df['tasa_exito_pct']]
fig, ax = plt.subplots(figsize=(13, 5.8))
y_pos = np.arange(len(df))
bars = ax.barh(y_pos, df['tasa_exito_pct'], color=colors, alpha=0.85,
edgecolor='white', linewidth=0.8)
ax.set_yticks(y_pos)
ax.set_yticklabels(df['etiqueta'], fontsize=9.5)
ax.invert_yaxis() # Más fácil arriba
for i, val in enumerate(df['tasa_exito_pct']):
ax.text(val + 1.5, i, f'{val:.0f}%', va='center',
fontsize=11, fontweight='bold', color=colors[i])
# Línea vertical en 50% (azar para binario aterriza-cerca / no-aterriza)
ax.axvline(x=50, color='#999999', linestyle=':', linewidth=1, alpha=0.6)
ax.text(50.5, len(df) - 0.5, '50%', fontsize=8, color='#999999', style='italic')
ax.set_xlim(0, 115)
ax.set_xlabel('% de vuelos que regresaron al área de aterrizaje', fontsize=11)
ax.set_title('De pasillo cubierto a 600 m con viento',
fontsize=14, fontweight='bold', pad=28)
ax.text(0.5, 1.03,
'Tasa de éxito de homing en seis ambientes reales',
transform=ax.transAxes, fontsize=10, color='#666666', ha='center')
fig.text(0.13, -0.04, FUENTE, fontsize=7.5, color='#999999', style='italic')
plt.tight_layout()
plt.savefig('figuras/03_exito_ambiente.png', dpi=200, bbox_inches='tight')
plt.show()
# Caída por viento alto
drop_viento = 80 - 50
print(f'Caída por viento alto (mismo rango 200-330m): {drop_viento} puntos porcentuales')
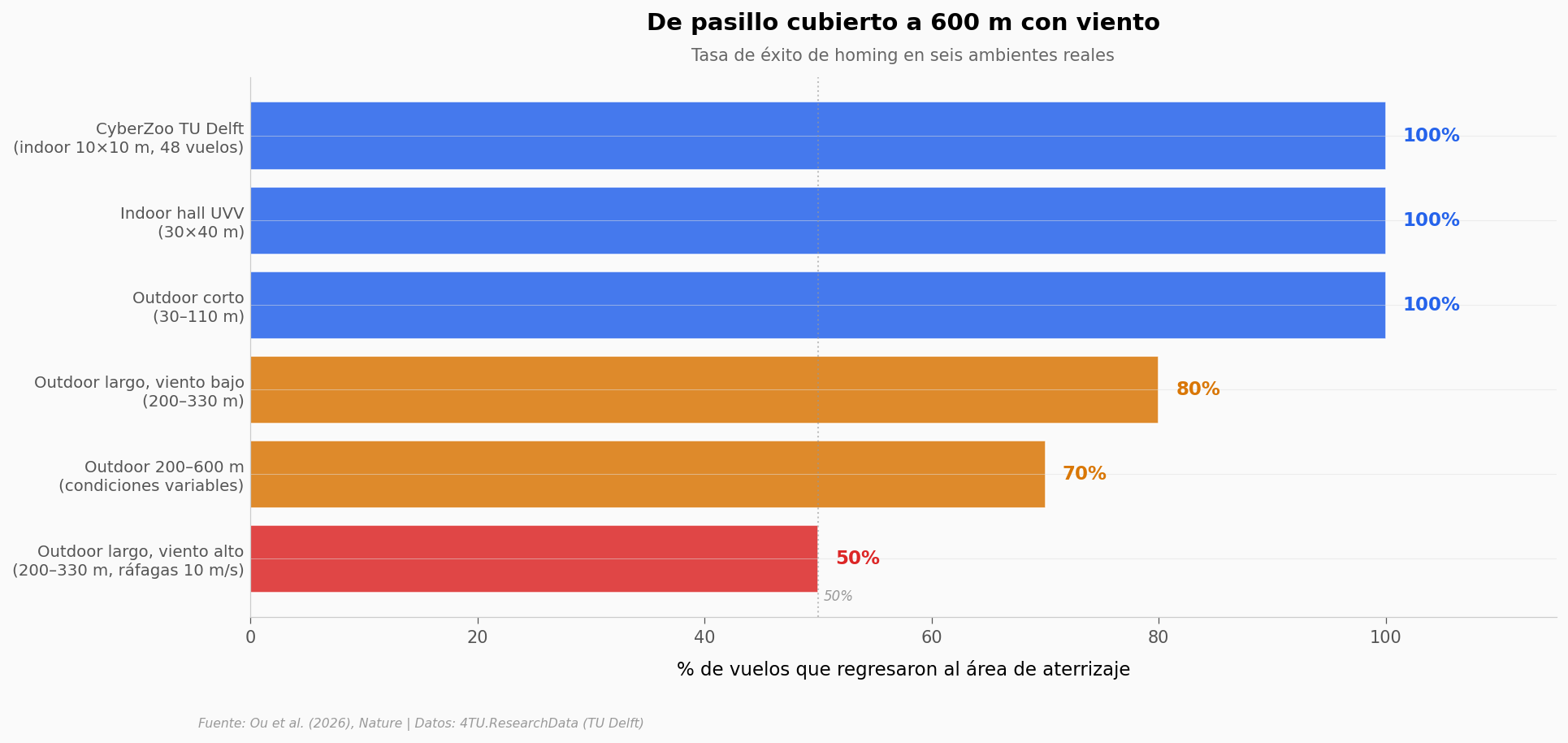
Caída por viento alto (mismo rango 200-330m): 30 puntos porcentuales
¿Hasta dónde generaliza?#
Una pregunta crítica: el drone aprende dentro de la Learning Area. ¿Qué pasa cuando se aleja? ¿Sigue sabiendo volver?
Para responderlo, el equipo corrió 800 vuelos simulados en 10 bosques sintéticos distintos (40 árboles cada uno) y compararon Bee-Nav con dos métodos de referencia: snapshot clásico y perfect memory.
# Cierre cuantitativo: hasta dónde generaliza cada método (múltiplo del radio LHA)
# Aplicando excepción benchmark de regla 6: 3 métodos discretos sin distribución temporal
metodos = ['snapshot\n(clásico)', 'perfect memory\n(referencia teórica)', 'Bee-Nav\n(este paper)']
generaliza = [1.0, 1.5, 2.5]
colors = [COLOR_OTROS, COLOR_REFERENCIA, COLOR_DATOS]
fig, ax = plt.subplots(figsize=(11, 5.5))
positions = np.arange(len(metodos))
bars = ax.bar(positions, generaliza, color=colors, alpha=0.85,
edgecolor='white', linewidth=0.8, width=0.55)
ax.set_xticks(positions)
ax.set_xticklabels(metodos, fontsize=10)
for i, val in enumerate(generaliza):
ax.text(i, val + 0.07, f'{val:.1f}× LHA', ha='center',
fontsize=12, fontweight='bold', color=colors[i])
# Línea horizontal en 1.0 = el borde del LHA
ax.axhline(y=1.0, color='#999999', linestyle='--', linewidth=1, alpha=0.6)
ax.text(2.45, 1.05, 'borde del LHA', fontsize=8.5, ha='right',
color='#999999', style='italic')
ax.set_ylim(0, 3.0)
ax.set_ylabel('Distancia máxima de homing exitoso\n(múltiplo del radio del LHA)',
fontsize=11)
ax.set_title('Bee-Nav generaliza 2,5× más allá del área aprendida',
fontsize=14, fontweight='bold', pad=28)
ax.text(0.5, 1.03,
'800 vuelos simulados en 10 bosques sintéticos · radio LHA = 10 m',
transform=ax.transAxes, fontsize=10, color='#666666', ha='center')
fig.text(0.13, -0.04, FUENTE, fontsize=7.5, color='#999999', style='italic')
plt.tight_layout()
plt.savefig('figuras/04_generalizacion.png', dpi=200, bbox_inches='tight')
plt.show()
# Ratio Bee-Nav vs snapshot
print(f'Bee-Nav generaliza {2.5/1.0:.1f}× más lejos que snapshot clásico')
print(f'Bee-Nav generaliza {2.5/1.5:.2f}× más lejos que perfect memory teórico')
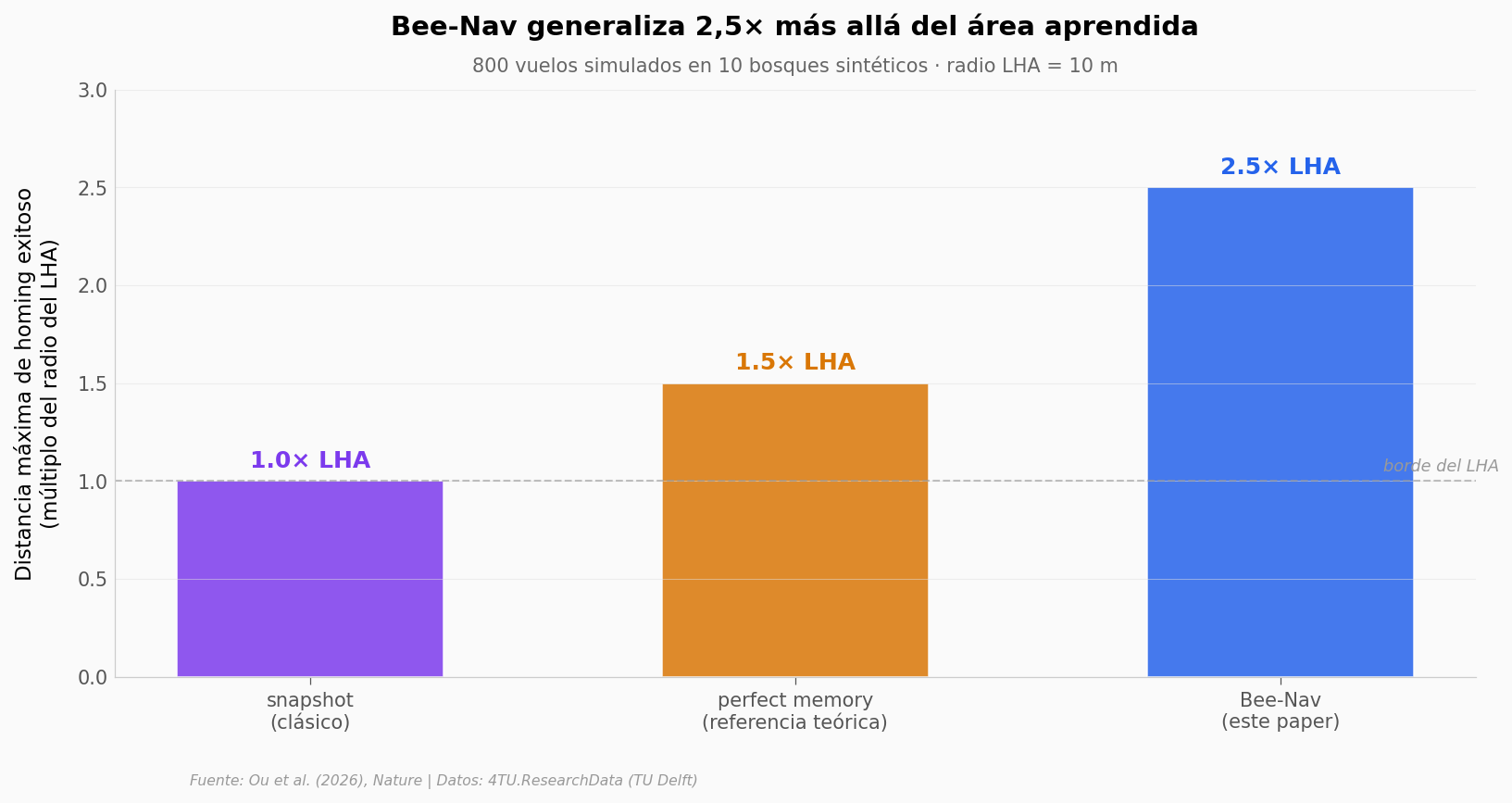
Bee-Nav generaliza 2.5× más lejos que snapshot clásico
Bee-Nav generaliza 1.67× más lejos que perfect memory teórico
Lo que los datos soportan#
Afirmación |
¿Soportada? |
Detalle |
|---|---|---|
El drone real necesita explorar 3,84% del área para volver a casa |
✅ |
Reportado en Results sobre datos PX4 reales (Fig 2b). Coincide con la banda biológica (3,4–7,6%). |
La red neural Bee-Nav compact mide 3,4 kB; attention 42,3 kB |
✅ |
Conteo directo de parámetros × bits — verificable. SOTA tiny drone usa 500 kB para 4×5 m (Bardienus 2024). |
Bee-Nav generaliza hasta 2,5× el radio del LHA |
✅ |
800 vuelos simulados en 10 bosques sintéticos. Snapshot clásico falla a 1,0×; perfect memory llega a 1,5×. |
100% de éxito en vuelos cortos exteriores (30–110 m); 70% en vuelos largos (200–600 m) |
✅ |
48 vuelos en CyberZoo, n no detallado en UVV. El 70% del abstract incluye condiciones variables de viento. |
El viento alto reduce 30 puntos porcentuales la tasa de éxito |
✅ |
80% con viento bajo → 50% con viento alto (ráfagas de 10 m/s) en el mismo rango 200–330 m. |
El drone «iguala» al cerebro de la abeja |
⚠️ |
El LHA% del drone (3,84%) coincide con el estimado para abejas (3,4%), pero el mecanismo es distinto. El paper lo describe como una verificación preliminar de la estrategia, no como equivalencia funcional. |
Limitaciones: (1) Los LHA% de abeja y hormiga son estimaciones derivadas de comportamiento natural, no medidas directas — son referencias de magnitud, no de precisión. (2) Los conteos n por ambiente outdoor no se publican explícitamente, solo se reporta la tasa. (3) Los 800 vuelos de simulación corren en bosques sintéticos uniformes (40 árboles en 50×50 m); el mundo real tiene mucha más heterogeneidad. (4) El raw dataset (716 MB en 4TU.ResearchData, formato PX4 .ulg + ROS2 bags) no se procesó en este notebook por tamaño y por no ser didáctico — los valores cuantitativos vienen del texto del paper y su Supplementary.
Ahora tú#
¿Y si bajamos el LHA del drone? Cambia
LHA_DRONE_BEE_NAV = 3.84por2.0en la celda de configuración y vuelve a correr la primera gráfica. ¿Sigue dentro de la banda biológica?¿Cuántas veces más pesa el SOTA tiny drone que Bee-Nav compact? Calcula
SOTA_TINY_KB / RED_COMPACT_KB. ¿Por cuál factor podrías meter la red de Bee-Nav?¿A qué tasa de éxito caerías si combinas ambos efectos: distancia larga + viento alto? Pista: en el dataset
homing, filtra poroutdoor_200_330m_high_windy compara conoutdoor_30_110m_UVV.
# --- EXPERIMENTA AQUÍ ---
# Pregunta 2 del bloque "Ahora tú": cuántas veces más pesa el SOTA que Bee-Nav compact
factor_compact = SOTA_TINY_KB / RED_COMPACT_KB
factor_attention = SOTA_TINY_KB / RED_ATTENTION_KB
print(f'SOTA tiny drone pesa {factor_compact:.0f}× más que Bee-Nav compact')
print(f'SOTA tiny drone pesa {factor_attention:.1f}× más que Bee-Nav attention')
print()
print(f'En el espacio de UN SOTA tiny drone caben:')
print(f' {factor_compact:.0f} redes Bee-Nav compact')
print(f' o {factor_attention:.1f} redes Bee-Nav attention')
# Bonus: ¿cuánto cubre Bee-Nav vs SOTA por kB de memoria?
# SOTA: 500 kB → 20 m² (4x5)
# Bee-Nav compact: 3.4 kB → al menos 110 m de radio efectivo
sota_m2_por_kB = 20 / SOTA_TINY_KB
beenav_m_por_kB = 110 / RED_COMPACT_KB # vuelos 30-110m exitosos al 100%
print()
print(f'Eficiencia espacial (orden de magnitud):')
print(f' SOTA tiny: {sota_m2_por_kB:.3f} m² / kB')
print(f' Bee-Nav compact: ~{beenav_m_por_kB:.0f} m / kB (radio efectivo)')
SOTA tiny drone pesa 147× más que Bee-Nav compact
SOTA tiny drone pesa 11.8× más que Bee-Nav attention
En el espacio de UN SOTA tiny drone caben:
147 redes Bee-Nav compact
o 11.8 redes Bee-Nav attention
Eficiencia espacial (orden de magnitud):
SOTA tiny: 0.040 m² / kB
Bee-Nav compact: ~32 m / kB (radio efectivo)
Créditos#
Repo CaM: github.com/Ciencia-a-Mordiscos/lab Licencia: Notebook bajo MIT. Datos del paper son Open Access (CC BY 4.0 vía Nature).
Fuentes#
Paper: Efficient robot navigation inspired by honeybee learning flights
Nature, 2026-05-13
Datos: Bee-Nav: Data supporting the publication “Efficient robot navigation inspired by honeybee learning flights”
4TU.ResearchData (TU Delft), 2026-04-10 — raw dataset (716 MB, formato PX4 .ulg + ROS2 bags) no procesado en este notebook; CSVs construidos desde los valores cuantitativos publicados en el texto del paper Open Access.
24 afirmaciones del notebook verificadas contra estas fuentes