
Un drone vuelve a casa con una red de 3,4 kB#
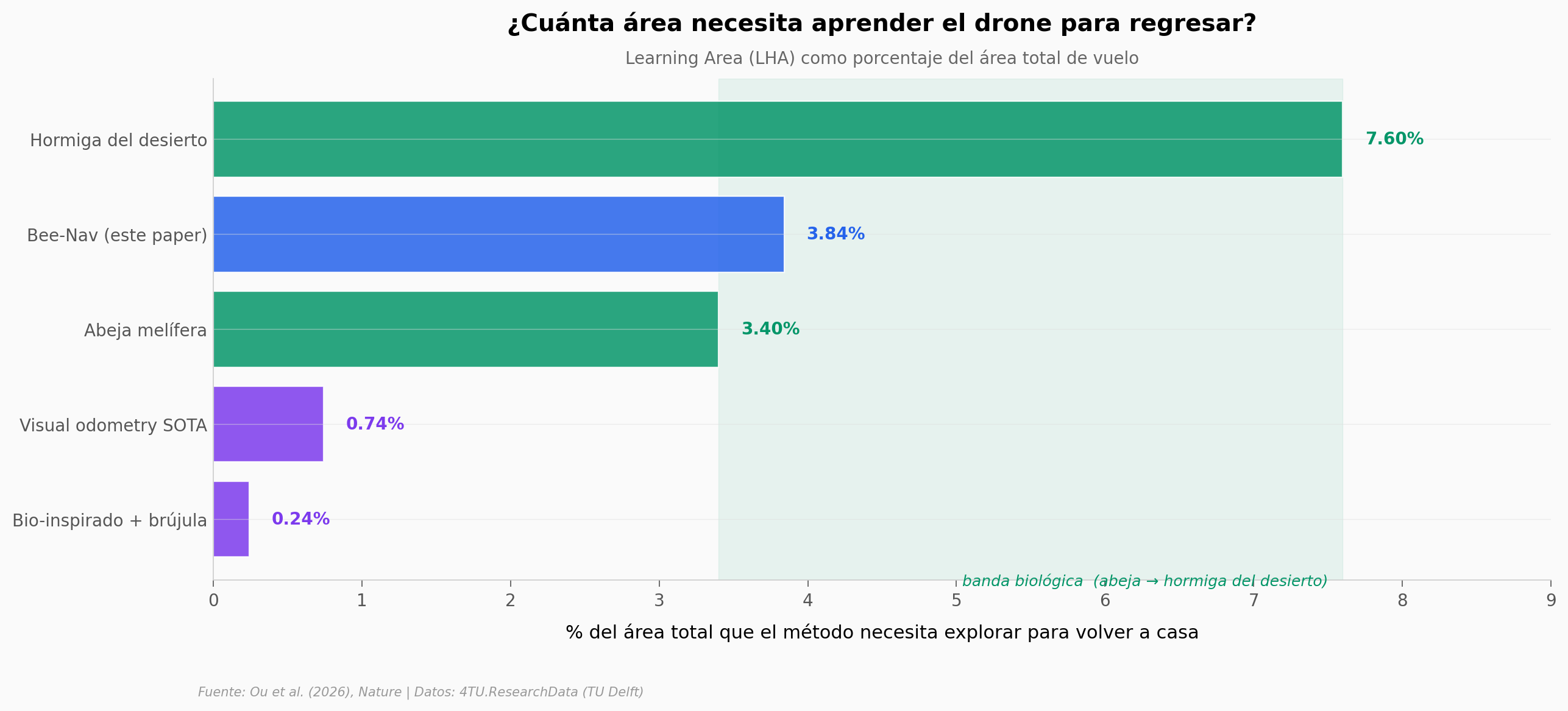
Un equipo de TU Delft entrenó un drone Crazyflie de 32 gramos para regresar a casa después de vuelos de hasta 600 m, sin GPS y con una red neuronal de 3,4 kB. La inspiración: el learning flight de la abeja melífera, esos vuelos en espiral que las recién nacidas hacen alrededor de la colmena. El drone solo necesita explorar el 3,84% del área total de vuelo — muy cerca del 3,4% estimado para abejas y por debajo del 7,6% de las hormigas del desierto.
El hallazgo: Bee-Nav navega vuelos de 30 a 110 m con éxito del 100% usando una red de 3,4 kB (147× más pequeña que el estado del arte para drones diminutos, que necesita 500 kB para cubrir 4×5 m). En vuelos largos (200–600 m) la red de atención de 42,3 kB mantiene un 70% de éxito incluso con condiciones variables de viento.
Gráfica clave#
Reproducir#
![]()
O localmente:
pip install pandas matplotlib numpy
jupyter execute notebook.ipynb
Datos#
datos/lha_por_metodo.csv— LHA% por método de path integration (5 filas: drone real, SVO+GTSAM, bio-inspirado+brújula, abeja, hormiga del desierto).datos/redes_neuronales.csv— Tamaño y capas de las dos redes Bee-Nav vs SOTA tiny drone (3 filas).datos/homing_por_ambiente.csv— Tasa de éxito de homing en 6 ambientes reales (CyberZoo, indoor hall, outdoor cortos, outdoor largos con/sin viento).datos/visual_homing_simulacion.csv— Configuración y métricas de las 800 simulaciones en 10 bosques sintéticos.
El raw dataset completo (716 MB con flight logs PX4 .ulg, imágenes omnidireccionales y ROS2 bags) está en 4TU.ResearchData. Para este notebook construimos CSVs pequeños desde los valores cuantitativos publicados en el texto del paper Open Access.
Links#
Video: [Pendiente]
Paper: Ou et al. (2026), Nature — DOI: 10.1038/s41586-026-10461-3
Datos originales: 4TU.ResearchData (TU Delft)